What is TREMoR?
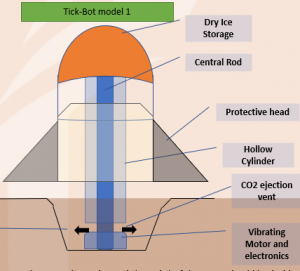
‘TREMoR’ (Tick collecting Robot for Entomological Modeling Research) is a stationary prototype device that builds on the standard tick trap approach to lure ticks. The Stationary Tickbot is undergrounded 1/6th of the meter. It consists of a compartment for dry ice which dispels CO2 and a motor which generates vibrations. This is done to mimic a living creature in the woods. Dry Ice also keeps pumping fog (condensed water vapour). This will keep the surroundings of the bot moist an ideal environment for ticks. The collecting chamber is undergrounded. This keeps the ticks intact without escaping. The Design is explained below:
Storage System:

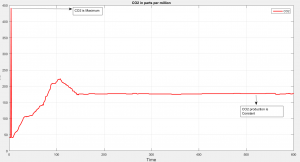
Dry Ice is a solid Carbon dioxide at a temperature of -79 degree Celcius. Dry Ice is stored and, and Corban di Oxide is passed from the flow path. The Co2 is invisible but the foggy substance is the water vapour condensing in the air.
The other two good approaches for generating CO2 are by using Yeast Fermentation process and also Baking soda and Vinegar Reaction. In this, the first approach produces water in the reaction which helps the surroundings of the bot to be moist.
CO2 Generation using Baking soda: NaHCO3 + CH3COOH --> CH3COONa + H2CO3... and then H2CO3 --> H2O + CO2
Co2 generation using Yeast Fermentation: C6H12O6 → 2 C2H5OH + 2 CO.
CO2 generation by Baking soda and Calcium Chloride: 2 NaHCO3 + CaCl2 CaCO3 + CO2 + 2 NaCl + H2O
The drawback in the second equation is that it won’t generate water molecules but the advantages are that it produces a good amount of CO2. The above four methods will be researched and the best and optimum method will be chosen for the project.
Collecting unit:
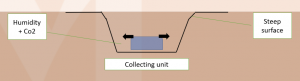
The Collecting unit can be designed in two ways. The first process is by collecting live ticks. The second process is by collecting the dead ticks. In the above design, ticks cannot escape the pit trap and would also not leave the place because of its suitable habitat.
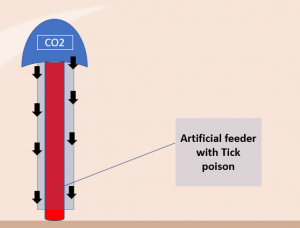
The second method is capturing the dead Ticks. This can be done by developing an artificial feeder. It is an artificial membrane made up of silicon. It is used as blood-feeders in the research laboratories. We can use the same technology to bait our ticks with a tick poison. Since the Poison is inside the bot the tick is exposed only when it bites the feeder. This helps solves the purpose of not exposing poisonous chemicals into the environment.
Ground Vibration:
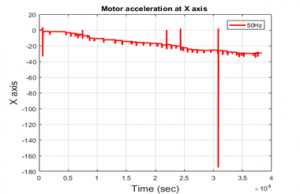
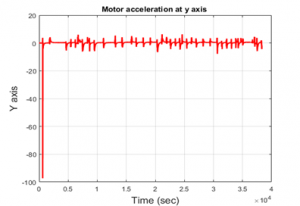
The Idea of ground Vibration is to mimic the animal footsteps. This will lure the ticks as the can feel the vibrations of the animal movement. The ground vibration could be achieved in two ways:
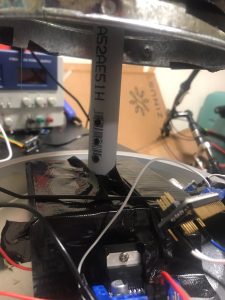
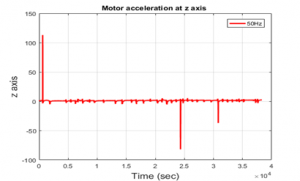
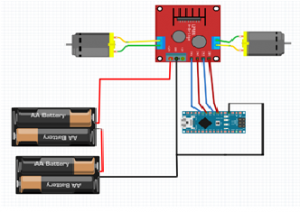
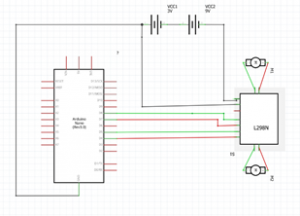
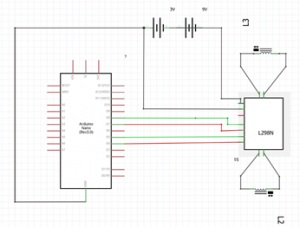
The dynamic motion of the motor: This can be generated by small motors with high RPM. This is to be done by placing a 12V motor inside the vibrating chamber. The vibrations must be made periodic by controlling the voltage of the motor. A simple example is our mobile phones in the vibrating state. Our mobiles vibrate with the help of a small motor. So, a powerful 12V high RPM must be good enough for the project. This can be done by a few simple electronics that are given :
- 12V motor
- Pololu Driver 8835
- Arduino Nano or Raspberry
- Connecting wires
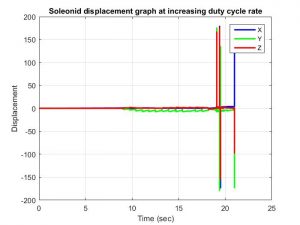
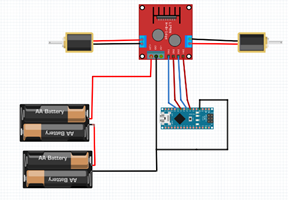
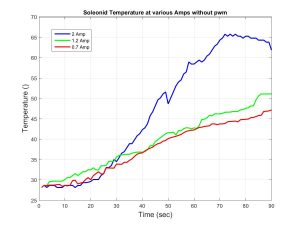
Oscillation of the Magnets:
The oscillating solenoid is a good way to generate ground vibrations. This can be done by placing a magnet in between the solenoid. When current flows through the coil, it generates a magnetic field inside the coil which attracts the armature towards the centre of the solenoid using the same basic principles as ordinary electromagnets.

Since the armature is drawn towards the centre of the solenoid regardless of the polarity of the current, an opposing force is needed to return the armature into the starting position when the coil is not energized. This is achieved by using a spring mechanism. This movement can be converted into ground vibrations.